
























作品詳情
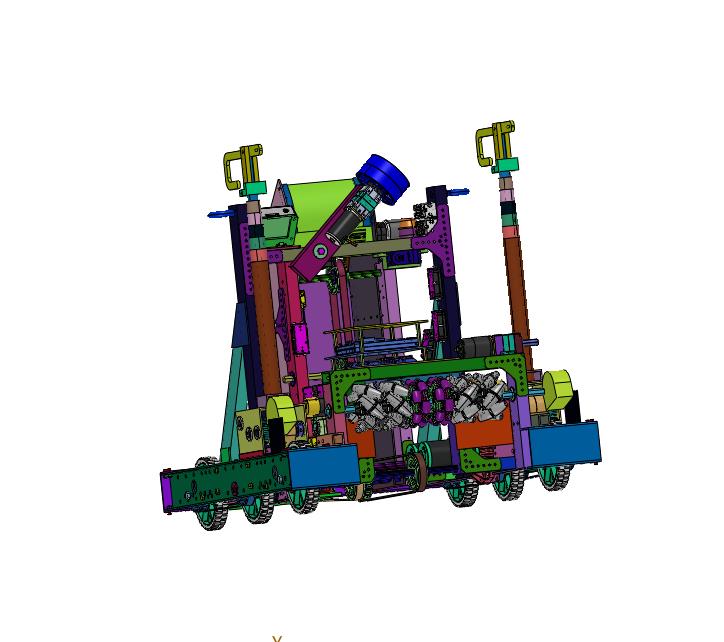
基于Arduino開源平臺開發(fā)的拋球移動尋位機器人是一種集成了多種技術(shù)的自動化裝置。該機器人通過Arduino的核心控制器進行編程和操作,具備拋球和自動定位功能。它結(jié)合了移動控制和機械操作技術(shù),通過傳感器感知環(huán)境信息,并利用算法進行數(shù)據(jù)處理,實現(xiàn)精準拋球和移動尋位。此外,由于基于Arduino開源平臺,該機器人具有較高的靈活性和可擴展性,可適應(yīng)不同的應(yīng)用場景和需求。



平diy桌面級快速成型3D打印機")




動臺袋子印畫設(shè)備")










